Machine Perception: Enabling Computers to "See," "Hear," and "Understand" the World
Machine perception is a burgeoning field within artificial intelligence (AI) that empowers machines to interpret and make sense of data from the physical world, mimicking human senses like sight, hearing, touch, smell, and even taste. It bridges the gap between raw sensory input and meaningful understanding, allowing computers to interact with and operate within complex, dynamic environments. Unlike traditional computer vision or audio processing, which often focus on isolated tasks, machine perception encompasses the integration of multiple sensory modalities to build a holistic representation of the surrounding environment and the events occurring within it. This involves not only recognizing objects or sounds but also understanding their relationships, inferring intentions, predicting future states, and adapting behavior accordingly. The ultimate goal is to equip machines with a level of situational awareness and cognitive ability that enables them to perform tasks that traditionally require human intelligence and adaptability.
The core of machine perception lies in processing and interpreting data from a variety of sensors. These sensors act as the "eyes," "ears," and "nerves" of the machine, collecting raw information about the physical world. Common sensors include cameras (for visual data), microphones (for auditory data), LiDAR (Light Detection and Ranging) and radar (for distance and spatial mapping), ultrasonic sensors (for proximity detection), inertial measurement units (IMUs) (for motion and orientation), and increasingly, tactile and olfactory sensors for more advanced applications. The diversity and richness of sensor data provide the foundation for machines to build a comprehensive understanding of their surroundings. For example, a self-driving car utilizes cameras to detect lane markings and traffic signs, LiDAR to map the precise shape and distance of other vehicles and obstacles, and radar to sense their velocity, even in adverse weather conditions. Similarly, a robot designed for industrial inspection might use cameras to identify surface defects, microphones to listen for unusual operational sounds indicative of wear and tear, and tactile sensors to assess the texture or grip of components.
The process of machine perception typically involves several key stages, beginning with data acquisition. This is where sensors actively collect information from the environment. Once acquired, this raw data is often preprocessed to remove noise, standardize formats, and enhance salient features. For instance, images might undergo noise reduction, contrast enhancement, or geometric correction. Audio signals might be filtered to remove background chatter or amplified to isolate specific sounds. Following preprocessing, feature extraction becomes crucial. This stage involves identifying and quantifying meaningful characteristics within the data. In computer vision, this could mean detecting edges, corners, or textures. In audio processing, it might involve extracting the fundamental frequency, spectral envelope, or transient characteristics of a sound. The choice of features is highly dependent on the specific task and the type of sensor data.
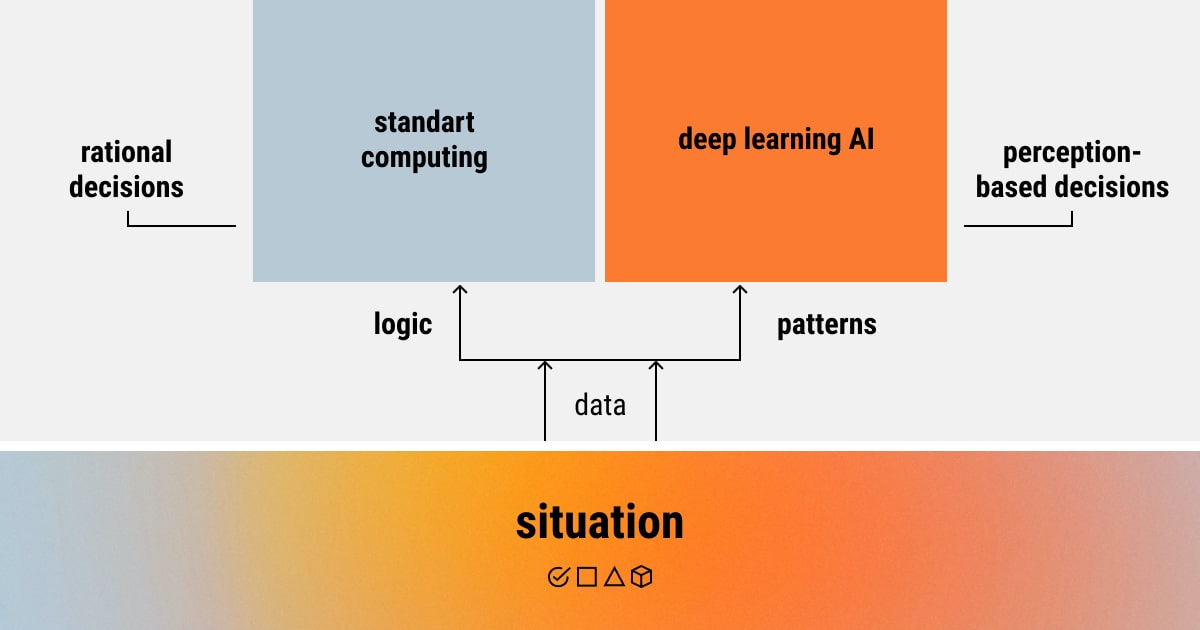
The heart of machine perception lies in interpretation and understanding, where sophisticated algorithms and machine learning models are employed to make sense of the extracted features. This is where patterns are recognized, objects are classified, and events are understood. Machine learning, particularly deep learning, has revolutionized this aspect. Convolutional Neural Networks (CNNs) are paramount in visual perception, enabling machines to learn hierarchical representations of images, from simple edges to complex object categories. Recurrent Neural Networks (RNNs) and their advanced variants like Long Short-Term Memory (LSTM) networks are instrumental in processing sequential data, such as audio streams or time-series sensor readings, allowing machines to understand context and temporal dependencies. Transformer architectures, initially developed for natural language processing, are also gaining traction in multi-modal perception, adept at capturing long-range dependencies and relationships across different data types.
Multi-modal fusion is a critical aspect of advanced machine perception, enabling systems to combine information from multiple sensors for a more robust and comprehensive understanding. This is analogous to how humans integrate visual and auditory cues to better comprehend a situation. For instance, a robot might use visual data to identify a spoken command and then fuse this with auditory data to confirm the speaker’s identity and emotional state. Similarly, in autonomous navigation, fusing LiDAR data with camera imagery allows for more accurate 3D mapping and object localization. Different fusion strategies exist, including early fusion (combining raw sensor data), late fusion (combining decisions or predictions from individual modalities), and intermediate fusion (combining features extracted from different modalities). The effectiveness of fusion depends on the complementary nature of the sensory inputs and the ability of the algorithms to effectively weigh and integrate information.
Machine perception is fundamentally driven by machine learning algorithms. Supervised learning is widely used for tasks like object recognition and speech classification, where labeled datasets are used to train models. Unsupervised learning is valuable for discovering patterns and structures in unlabeled data, such as clustering similar sounds or segmenting image regions. Reinforcement learning plays a crucial role in enabling machines to learn through trial and error, making decisions and adapting their perceptual capabilities based on feedback from their environment, which is particularly relevant for dynamic and interactive scenarios. The ongoing advancements in deep learning architectures, optimization techniques, and the availability of large-scale datasets are continuously pushing the boundaries of what is achievable in machine perception.
Key sub-disciplines within machine perception include computer vision, audio processing, and natural language processing (NLP), though the distinction is becoming increasingly blurred as systems move towards multi-modal understanding. Computer vision enables machines to "see" by interpreting images and videos, allowing for tasks like object detection, recognition, tracking, and scene understanding. Audio processing equips machines to "hear" by analyzing sound waves, enabling speech recognition, sound event detection, speaker identification, and acoustic scene analysis. NLP allows machines to "understand" human language, facilitating tasks like text analysis, sentiment detection, question answering, and machine translation. The synergy between these disciplines, facilitated by multi-modal perception, allows for richer and more sophisticated understanding. For example, understanding a spoken command in a visual scene requires combining NLP with computer vision.
The applications of machine perception are vast and rapidly expanding across numerous industries. In autonomous vehicles, it is indispensable for navigation, obstacle avoidance, and understanding traffic situations. Robotics relies heavily on machine perception for manipulation, navigation, human-robot interaction, and environmental awareness. In healthcare, machine perception is used for medical image analysis, patient monitoring, and robotic surgery. Smart manufacturing employs it for quality control, predictive maintenance, and automated assembly. Retail utilizes it for inventory management, customer analytics, and personalized experiences. Security and surveillance systems benefit from object detection, anomaly detection, and behavior analysis. Even in consumer electronics, features like facial recognition on smartphones and voice assistants on smart speakers are direct applications of machine perception.
Challenges in machine perception are significant and drive ongoing research. Robustness to variability is a major hurdle, as real-world environments are inherently noisy, dynamic, and unpredictable. Machines need to perform reliably under varying lighting conditions, occlusions, background noise, and different viewpoints. Data scarcity for specific tasks or environments can hinder model training. Real-time processing requirements for many applications demand efficient algorithms and powerful hardware. Interpretability and explainability are also growing concerns, as understanding why a machine makes a particular perceptual decision is crucial for trust and debugging, especially in safety-critical domains. Furthermore, ethical considerations surrounding data privacy, bias in perception systems, and the potential for misuse are increasingly important.
The future of machine perception is characterized by increased integration, intelligence, and autonomy. We can anticipate machines that can perceive and understand the world with greater nuance and context, similar to human cognition. This includes developing more sophisticated models for causal reasoning and common-sense understanding, enabling machines to infer not just what is happening but also why. Active perception, where machines proactively seek out information to reduce uncertainty, will become more prevalent. The development of empathetic AI, capable of understanding and responding to human emotions, will also be a significant area of growth. As sensor technology continues to advance and computational power increases, machine perception systems will become more pervasive, enabling a new generation of intelligent machines that can interact with and contribute to the physical world in profound ways. The ongoing quest is to create systems that not only process sensory data but also exhibit a genuine understanding, leading to more intuitive, adaptive, and capable AI.

{kind=link}